专利
说明书摘要
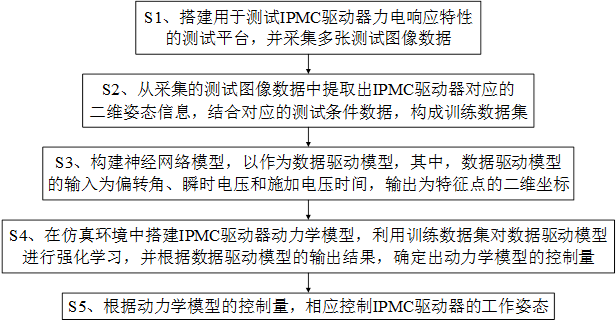
本发明涉及一种IPMC软体驱动器运动控制系统及其方法,该系统包括:IPMC驱动器的一端连接有夹持器,IPMC驱动器和夹持器分别连接至外部控制器,由外部控制器输出可控电信号给IPMC驱动器,使IPMC驱动器发生相应运动。该方法包括:首先测试IPMC驱动器力电响应特性,从采集的测试图像中提取IPMC驱动器对应的二维姿态信息,结合对应测试条件数据,构成训练数据集;再构建神经网络模型,以作为数据驱动模型;之后在仿真环境中搭建IPMC驱动器动力学模型,利用训练数据集对数据驱动模型进行强化学习,并根据数据驱动模型的输出结果,确定出动力学模型的控制量,以相应控制IPMC驱动器的工作姿态。与现有技术相比,本发明能有效提高对IPMC软体驱动器运动控制的定位精度和稳定性。
摘要附图
权利要求书
说明书